The term "motion tracking" refers to technology that enables
real-time measurement of an object's location and orientation.
At NIST, we use motion tracking devices in our immersive
visualization environment to monitor the position of the user
and of a hand-held interaction device.
Figure 1 shows NIST's immersive visualization system with
the motion tracker's transmitter and sensors as well as
the three screens that together provide the visual display.
The three screen are used to display a single three-dimensional
scene.
Traker Calibration is the method by which the errors
in the motion tracker's measurements of location and
orientation are assessed and corrections to those
errors are made in real-time.
Tracker calibration is important because errors in
measured location and orientation can substantially
compromise the effectiveness of the applications
that use motion tracking. For example, in NIST's
immersive visualization environment, errors in motion
tracking result in problems such as: virtual objects
move inappropriately as the user moves; straight lines
appear bent when they cross screen boundaries; and
virtual objects tied to the tracked hand-held device
appear incorrectly positioned.
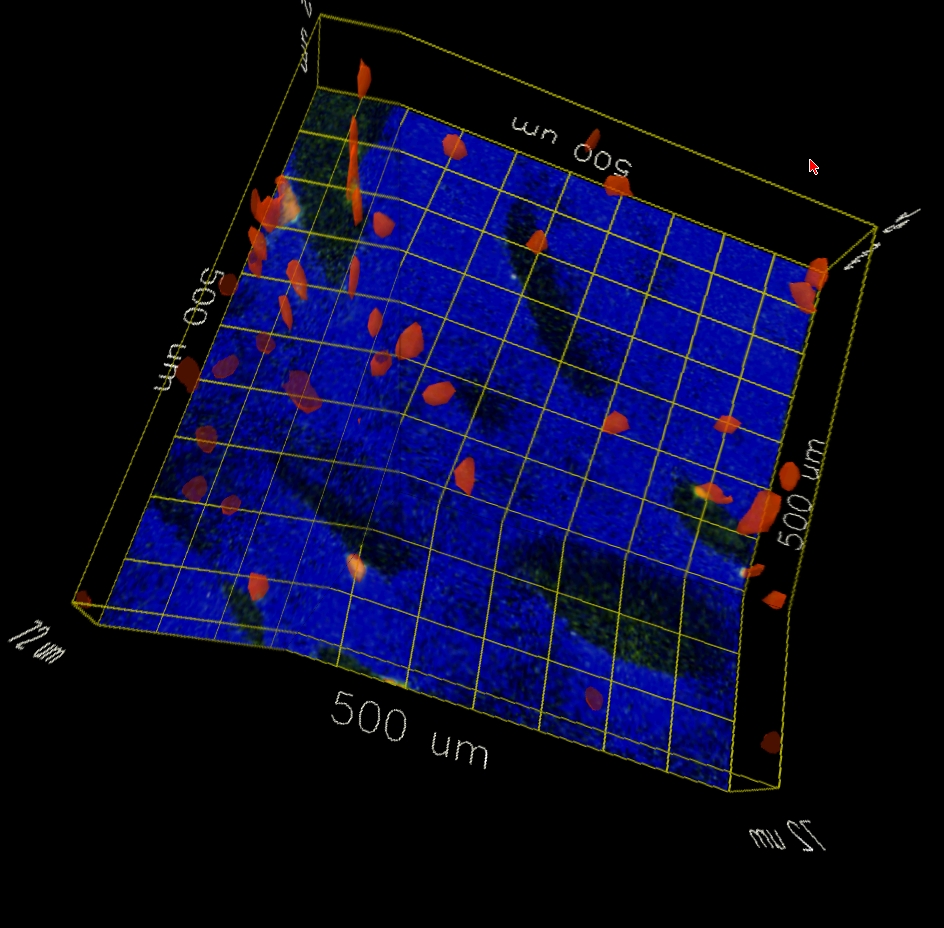
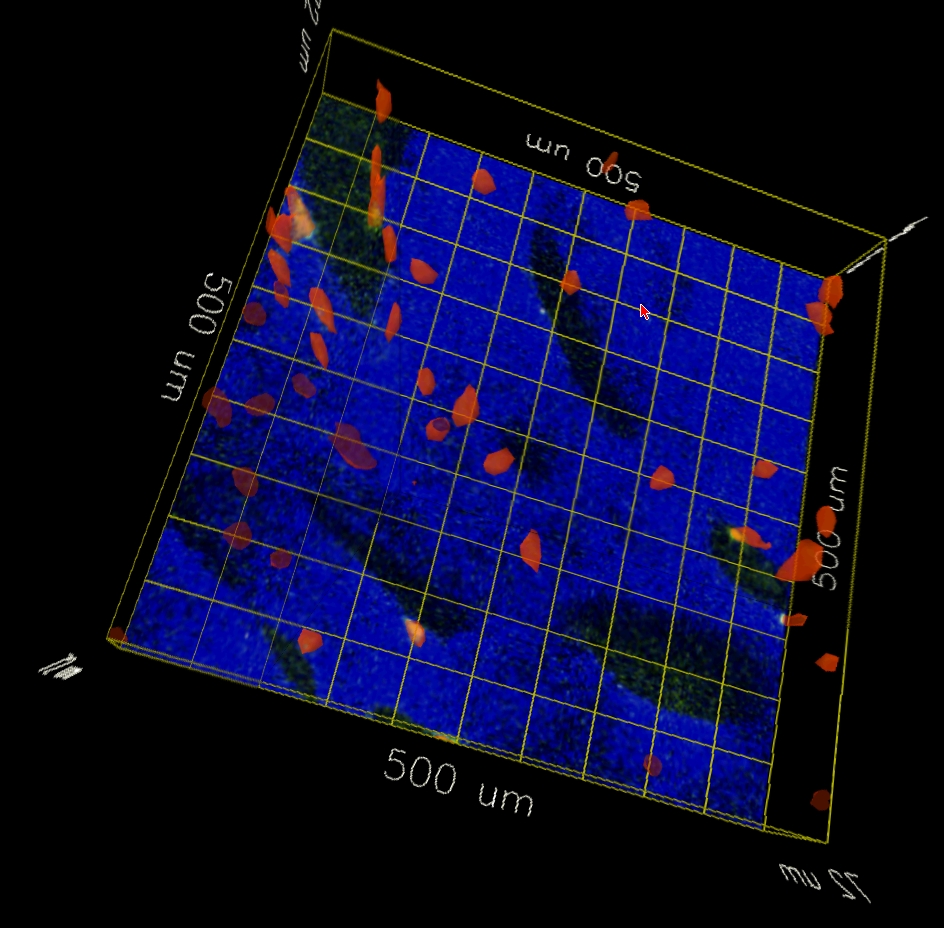
Figure 2 illustrates one of these effects. In this
figure, the grid lines should all be straight. To the
user in the immersive environment, the lines appear
bent at the points where they cross the boundaries
between screens because the images are being drawn
based on an incorrect tracked location for the eyes
of the observer. This figure is based on actual errors
observed in the motion tracking system at NIST. It is
by no means the worst case that could have been
provided. In informal observations that we made before
initiating this project, we observed location errors in
excess of 50 cm and orientation errors that appeared
to be more than 15 degrees.
To correct the raw tracker data, we first record
the tracker's measurements at a large set of known
locations and orientations that encompass the
volume that we need to accurately track. This
enables us to calculate corrections at each of these
points. We then perform a Delaunay tetrahedralization
of the points based on the measured loca tions.
Then, in real time, as the tracker reports each
location and orientation, we find the tetrahedron
that contains the measured location and generate
barycentric coordinates for this location relative
to the containing tetrahedron. The barycentric
coordinates are used as weights for performing
weighted averaging of the corrections at the
vertices of the containing tetrahedron.
For orientation averaging, we use these weights with
a spherical weighted averaging technique to average
the correction rotations at each of the four vertices
of the tetrahedron. This use of barycentric coordinates
with spherical weighted averaging has a much clearer
geometric rationale than previous methods.
|
|
|
|